
 サイバーセキュリティ先端研究所
サイバーセキュリティ先端研究所デジタルツイン
サイバー空間とフィジカル空間をつなぐデジタルツイン技術を活用し、次世代のモビリティ社会の実現を目指しています。センサーやAI、IoT、シミュレーション等を統合し、物理環境や社会活動をサイバー空間上に忠実に再現することで、現実世界の動きをリアルタイムに分析・予測します。これにより、効率的で安全・安心な社会システムの構築を目指し、持続可能な未来社会の実現に貢献します。
ミッション
デジタルツイン技術を活用することで、次世代モビリティと社会インフラの高度化を目指します。当研究所では、自動運転やドローン、運転技術評価シミュレータ等多様なモビリティシステムをサイバー空間上で再現し、現実の挙動をリアルタイムに解析・制御する基盤の構築を進めています。これにより、交通や空域のシミュレーションを通じて、安全性と効率性を両立する新たなモビリティ社会の形成を目指します。

プロジェクト/研究紹介
次世代型自動運転開発検証プラットフォーム
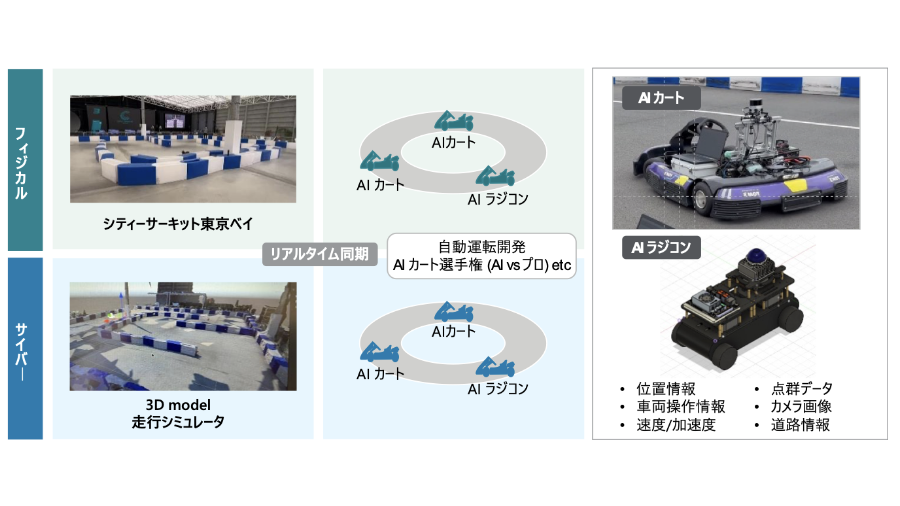
当研究所では、サイバー空間とフィジカル空間を融合した次世代の自動運転開発・検証プラットフォームの開発に取り組んでいます。シミュレーション環境と実車両、センサ、通信ネットワーク等をリアルタイムに連携させることで、現実に近い環境下での走行挙動を再現し、安全かつ効率的な自動運転技術の評価を可能にします。従来は困難だった危険なシナリオや異常系といったテストを、デジタルツイン技術を活用することで低リスク・低コストで再現できます。

自動運転EVカート - AIカート
当研究所では、EVカートに自動運転技術を搭載した「AIカート」を開発し、その性能を競うレースプロジェクトを推進しています。自動運転の基盤システムは、当研究所のAIチームが設計・構築しています。環境に優しい電動カートと高度なAI制御を融合させ、次世代モータースポーツの可能性を探求しています。

シミュレーション
交通環境や社会システムを仮想空間に再現するデジタルツイン型シミュレーションを開発しています。リアルな走行・センサーデータと組み合わせることで、自動運転をはじめとするモビリティ技術の安全性・信頼性を効率的に検証し、社会実装を加速します。
3Dモデル生成
高度なデジタルツインによるシミュレーションを行う上では、高度な3Dモデルの生成アルゴリズムが必須となります。現実空間の画像や点群データ等を活用することで、高度な3Dモデルを生成する技術開発に取り組んでいます。
実績
- 9th Franco-Japanese Cybersecurity Workshopにおいて講演を行いました
- UPDATE EARTH 2025においてデジタルツインと自動運転を体験するコンテンツを提供しました
- 第22回ITSシンポジウムにおいて研究発表を行いました
- 自動運転開発を体験するイベント「第1回AIラジコン大会」を開催しました
- Maker Faire Tokyo 2024に出展しました